









The DC-03 pod is equipped with a high-precision three-axis non orthogonal gimbal, and is equipped with a wide-angle and 30x hybrid zoom camera. After finding the target object in the wide-angle image, it can quickly switch to the zoom image for detailed observation. The pod is also equipped with a laser rangefinder, which can provide the distance and position coordinates of the observation target, assist in fast and accurate positioning, and improve operational efficiency,
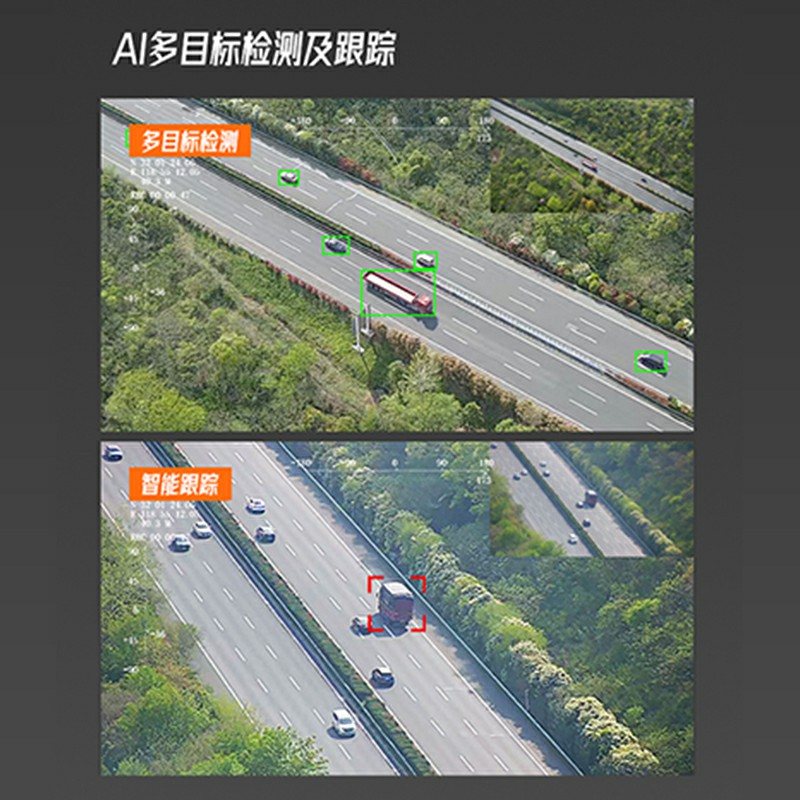
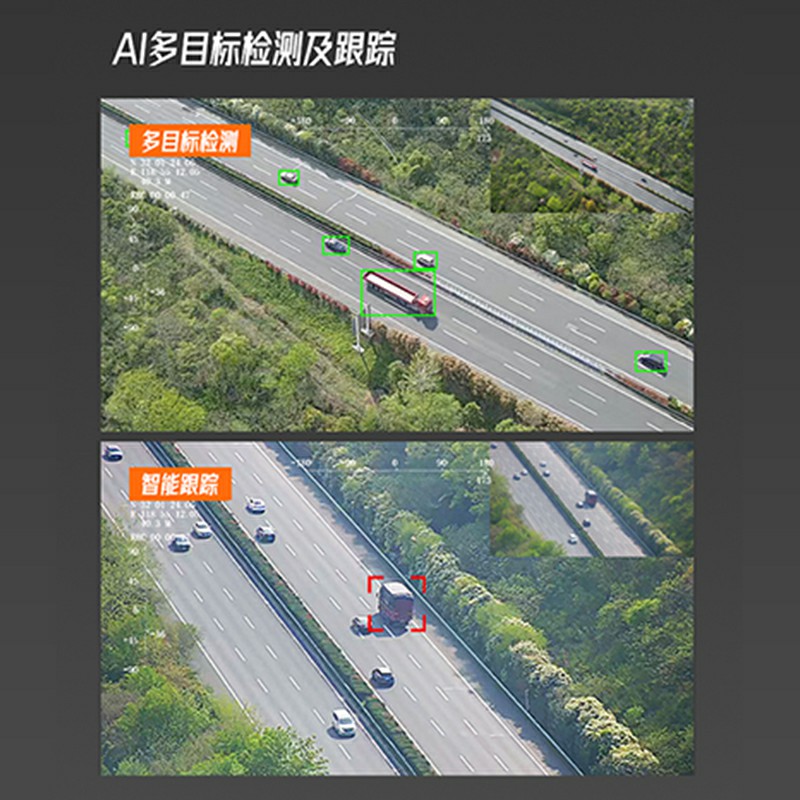
The DC-03 pod has Al multi-target detection and tracking capabilities. The pod can intelligently recognize pedestrians and vehicles in the captured image and continuously lock and track any target. The DC-03 pod supports both forward and reverse installation, and can be quickly installed on various unmanned aerial vehicles or other carrier platforms without the need for tools. Combined with GCU and Dragonfly display and control software, it can display real-time images on the computer and control the pod, supporting photography and video recording.
Equipped with AI multi-target detection and tracking capabilities, it can intelligently recognize pedestrians and vehicles in the captured images and continuously lock and track any of them. The wide-angle and 30x hybrid zoom camera form a dual field of view combination, allowing for quick switching between global view and detail images.
Laser rangefinder can provide the distance and position coordinates of the observed target, assisting in fast and accurate positioning.
Adopting a small-sized spherical shape and a non orthogonal three-axis mechanical stabilizing structure, we strive to minimize the turning radius and wind resistance. The yaw axis can rotate continuously 360 ° xN.
Cooperate with GCU to support network, serial port, and S BUS control, compatible with private protocols and MAV Link protocols, facilitating secondary development.
By using the dual IMU complementary algorithm, combined with IMU temperature control and carrier inertial navigation data fusion, the image stabilization accuracy can reach ± 0.01 °, and the pod can still remain stable during severe maneuvers of the carrier.
Supports both upright and inverted installation, allowing for quick installation on various carrier platforms.
In conjunction with GCU and Dragonfly display and control software, real-time display of images can be achieved on the computer without the need for protocol integration, while also enabling control of the pod.
The customized QGC software can be paired with open-source flight controllers to achieve all the functions of the pod.
The screen supports OSD information such as latitude, longitude, and altitude in Rongjia. Photos support writing the coordinates of the shooting point EXIF information. Video streams support adding SE1
14~53 VDC wide voltage input

The integrated plug design of FPV makes the whole aircraft more beautiful and simple. It provides ultra long battery life and is equipped with a camera. The unobstructed flying vision allows you to enjoy the eagle eye like expanse. At the same time, it can be equipped with a net catcher, which can be used not only for the control and capture of suspect by public security organs, but also for the capture of small aircraft, and even for the control and capture of ferocious animals that may attack humans in zoos or wild environments.
Details
This product can be used with the 60 mortar for precision projectiles, built-in unidirectional locking tongue structure is safe and solid, and can realise non-electricity loading operation and aerial loading operation.The product can be used with UAVs above 3kg load capacity to achieve a variety of channel number combinations and configurations, with built-in software insurance and hardware insurance switches to greatly improve operational safety, and optional visual targeting and laser targeting modules.
Details
This industrial 3-axis gimbal drone camera integrates cutting-edge hybrid zoom technology and FOC stabilization algorithms to deliver crystal-clear imaging even during high-speed maneuvers. Designed for aerial inspection and security surveillance missions, its anti-shake tech ensures millimeter-level accuracy in high-precision mapping applications. The ruggedized housing allows stable operation in windy environments, while the long-range telephoto capability (30x optical + 120x digital zoom) captures critical details from 500m away. Compatible with standard UAV imaging systems, it’s the ultimate drone camera for windy environment operations requiring reliability and clarity.
Details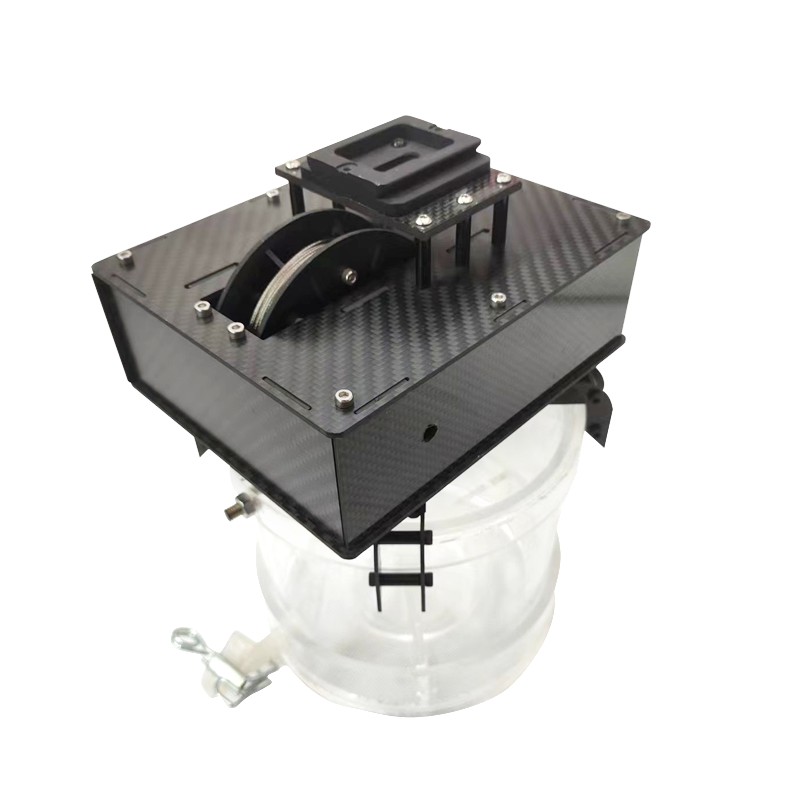
QS-1.5 UAV water extraction device is well made, unique structure design, and made of corrosion-resistant high synthesis materials. Water samples can be automatically taken from rivers, rivers and other areas by the mounted UAV to improve the efficiency of water sample collection. the lift-off device independently developed by our company ,which display the depth of sampling accuracy in real time, so as to achieve more accurate collection .
Details
The DC-03 pod is equipped with a high-precision three-axis non orthogonal gimbal, and is equipped with a wide-angle and 30x hybrid zoom camera. After finding the target object in the wide-angle image, it can quickly switch to the zoom image for detailed observation. The pod is also equipped with a laser rangefinder, which can provide the distance and position coordinates of the observation target, assist in fast and accurate positioning, and improve operational efficiency, The DC-03 pod has Al multi-target detection and tracking capabilities. The pod can intelligently recognize pedestrians and vehicles in the captured image and continuously lock and track any target. The DC-03 pod supports both forward and reverse installation, and can be quickly installed on various unmanned aerial vehicles or other carrier platforms without the need for tools. Combined with GCU and Dragonfly display and control software, it can display real-time images on the computer and control the pod, supporting photography and video recording.
Details
This multi-gas detection drone sensor system provides real-time air quality monitoring UAV capabilities, integrating over 100+ replaceable sensors to detect CO2, PM2.5, VOCs, and toxic gases like H2S. Designed for industrial VOC leak detector applications and environmental compliance checks, its 4G/WiFi dual-mode transmission delivers instant pollution maps to ground stations. The autonomous atmospheric data logger supports Chinese/English interfaces, enabling wireless PM2.5 drone mapping across factories, landfills, and disaster zones. With flight trajectory heatmaps and historical data comparison, it’s the ultimate dual-language environmental survey tool for industrial safety teams and EPA inspectors.
Details
In today's rapidly developing technology, military equipment is also constantly innovating. The innovative equipment of the Type 95 gun mounted on the drone is like a brilliant new star, shining brightly on the modern military stage.
Details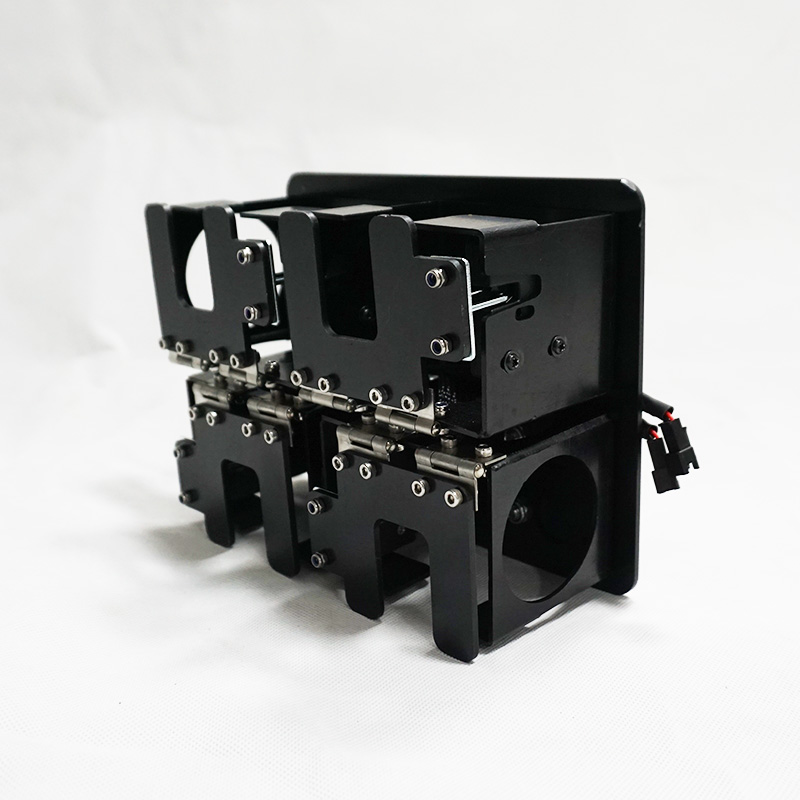
Engineered for high-accuracy strikes and rapid battlefield deployment, our Precision-Guided Drone-Mounted Mortar Launcher delivers 3m-target accuracy within a 5km control range, ideal for tactical missions and emergency response. Explore advanced specs and combat-ready features below.
Details
Engineered for precision and speed, our Multi-Payload Rapid-Deployment Drone-Mounted Smoke Grenade Launcher delivers high-altitude tactical smoke deployment with 38mm multi-scenario adaptability, ideal for counter-terrorism and emergency operations. Explore advanced specs and mission-ready features below.
Details
The LQ-4 four light pod integrates thermal imaging, zoom, laser ranging, and wide-angle modules, achieving all-weather precise detection through multi-source data collaboration. Equipped with a high-resolution thermal imaging system and long-range distance measurement function, combined with high magnification hybrid zoom and high magnification optical zoom technology, combined with large-sized photosensitive elements to support ultra high definition image recording, and with a high-definition wide-angle lens to expand the field of view. The built-in intelligent algorithm platform provides dynamic target tracking capability based on deep learning, and the heading axis global rotation design adapts to complex operational angle requirements. Optimizing the shock absorption structure and modular interface significantly improves environmental adaptability, supporting the expansion and integration of multiple devices. With high collaborative control algorithms and stable gimbal systems, it can maintain clear imaging and precise control in dynamic scenes, and can be widely applied to professional level mounting requirements in fields such as rotary wing aircraft, vertical takeoff and landing platforms, and intelligent mobile robots. This high-resolution thermal imaging laser rangefinder system integrates four advanced sensors to deliver all-weather environmental perception for drones and robots. With dynamic tracking and ultra-HD imaging, it ensures mission-critical clarity in fire rescue, terrain mapping, and industrial inspections.
Details
The dual light pod adopts a visible light/thermal imaging dual sensing collaborative design, with a lightweight structure enhancing the drone's multi-dimensional perception. The thermal imaging module is equipped with high-resolution sensors and telephoto lenses, supporting non-contact temperature measurement and abnormal heat source identification. Intelligent algorithms enable continuous target tracking and fast relocking, while dual lens synchronous zoom/stitching improves information efficiency. High definition image sensors combined with dynamic adjustment technology optimize image quality, and the large angle rotating pan tilt enables panoramic observation, adapting to complex scene requirements.
Details




 IPv6 network supported |
Sitemap
|
Xml
|
Blog
|
Privacy Policy
|
News
IPv6 network supported |
Sitemap
|
Xml
|
Blog
|
Privacy Policy
|
News
Our hours
Mon 11/21 - Wed 11/23: 9 AM - 8 PM
Thu 11/24: closed - Happy Thanksgiving!
Fri 11/25: 8 AM - 10 PM
Sat 11/26 - Sun 11/27: 10 AM - 9 PM
(all hours are Eastern Time)










